 English
English



Principle of strain wave gear
Composition of strain wave reducer
strain wave gear mainly consists of three basic parts, i.e. wave generator, flexspline and circular spline.
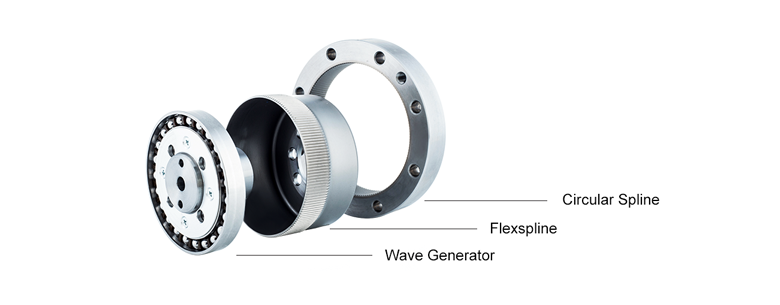
Wave Generator:It is composed of flexible bearing and oval cam. Wave generator is generally equipped at the input end of reducer with internal circle of flexible bearing fixed on the cam and elastic deformation of external circle to oval shape realized by means of roll balls.
Flexspline:It is a part of thin-walled elastomer carrying external tooth circle,which is generally equipped at output end of reducer.
Circular Spline:It is a part of rigid round ring carrying internal tooth circle, in general, it holds 2 more gear teeth than those of flexspline. The rigid spline is usually fixed on the body of reducer machine.
Strain wave gear principle
When harmonic gear is used as a speed reducer, wave generator is active, Circular spline is fixed, and flexspline takes output form.
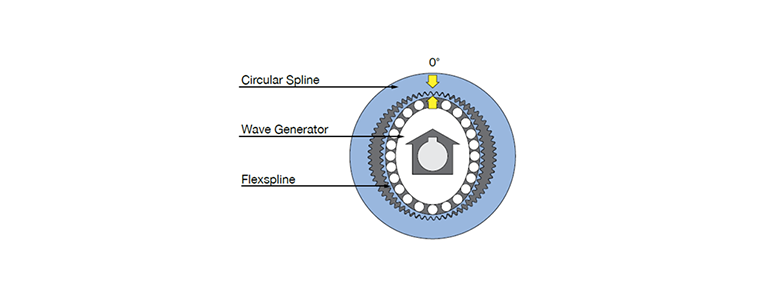
 When wave generator is loaded into internal circle of flexspline, flexspline is deformed to oval shape due to elasticity, then flexspline teeth at long axis place are inserted into rigid spline thoroughly, thus complete meshing status is realized. At this time, two wheels of gear teeth at short axis place do not contact completely, in other words, at the disconnected position. In the process from meshing to disconnection, the strain wave gear is at the status of meshing out or meshing in.
When wave generator is loaded into internal circle of flexspline, flexspline is deformed to oval shape due to elasticity, then flexspline teeth at long axis place are inserted into rigid spline thoroughly, thus complete meshing status is realized. At this time, two wheels of gear teeth at short axis place do not contact completely, in other words, at the disconnected position. In the process from meshing to disconnection, the strain wave gear is at the status of meshing out or meshing in.
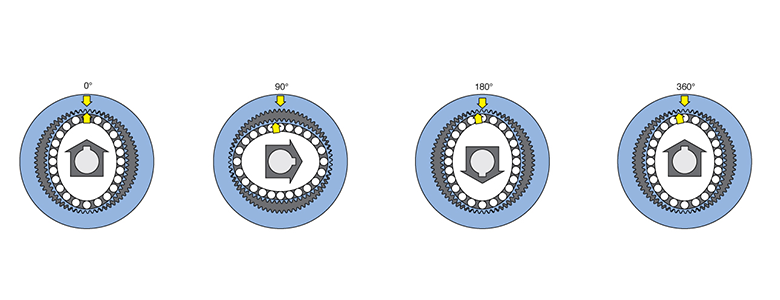
When wave generator rotates continuously, flexspline is deformed unceasingly, two wheels of gear teeth will change their own working status from meshing in, meshing, meshing out to disconnection, thus the so-called staggered movement happens, finally movement transmission from active wave generator to flexspline is achieved.
Characteristics of strain wave gear
High precision:Multiple teeth simultaneously mesh at two symmetry positions of 180°, hence, error of gear teeth space and accumulated error of teeth space impact evenly on rotation precision, therefore, extremely high position and rotation precision can be obtained.
Big transmission ratio:Single transmission ratio of strain wave reducer can reach i=30~500, furthermore, the structure is very simple, and three fundamental parts on the same axis can easily achieve high reduction ratio.
High bearing capacity:During strain wave reducer, teeth meshing belongs to surface contact, furthermore, comparatively more teeth can mesh together simultaneously, therefore, unit area bears small load, and load capacity is higher than that of other transmission forms.
Small size and light weight:Compared with ordinary gear device, strain wave reducer can significantly reduce size and weight, thus, miniaturization and light weight can be achieved in production..
High transmission efficiency and long life.
Smooth transmission, free shock and little noise.
A Unique Perspective on Harmonic Gearing
Traditionally, the design of a rigid gear sold on the market is based on the the Conjugate Meshing Theory (Willis’s Theorem). However,
researchers at Leaderdrive have discovered that strain wave gearing meshing is more complex than that. Instead, strain wave gearing
meshing can be more accurately described by the Geometric Mapping Theory of Curves. By incorporating this theory into the design, this
patented technology has greatly improved the meshing of strain wave gearing, differentiating the product from competitors. The design can also be further extended to high ratio rigid reducers for better precision and control.
The P-type Tooth Profile
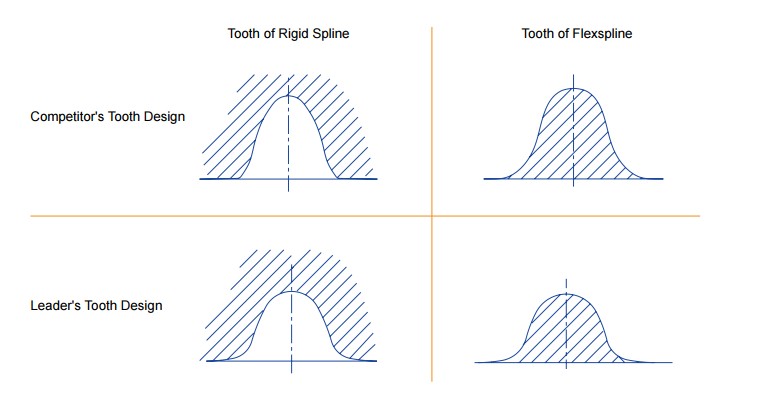
The unique P-type profile has distinctive advantages over a typical profile:
1. Lower profile reduces bending stress at the base to improve torque capacity.
2. Wide tooth base and streamlined profile transition reduces core stress concentration.
3. Lower profile reduces displacement and strain in the flexspine, leading to longer flexspline life.
4. More than 20%-30% of tooth compare to other competitor in meshing contact to reduce surface contact pressure.